对六自由度机械臂的运动控制及python实现(附源码)
经过一周的研究,对六自由度机械臂运动进行了研究,利用高中几何知识进行了运动控制策略的设计,无偿贡献出源码,可以为入门的小伙伴提供一定的借鉴。
1、机械臂物理参数的介绍
买了一个大象机械臂mycobot,作为研究对象,如果是其它机械臂,可以根据机械臂参数对代码进行修改。机械臂参数如下图所示:
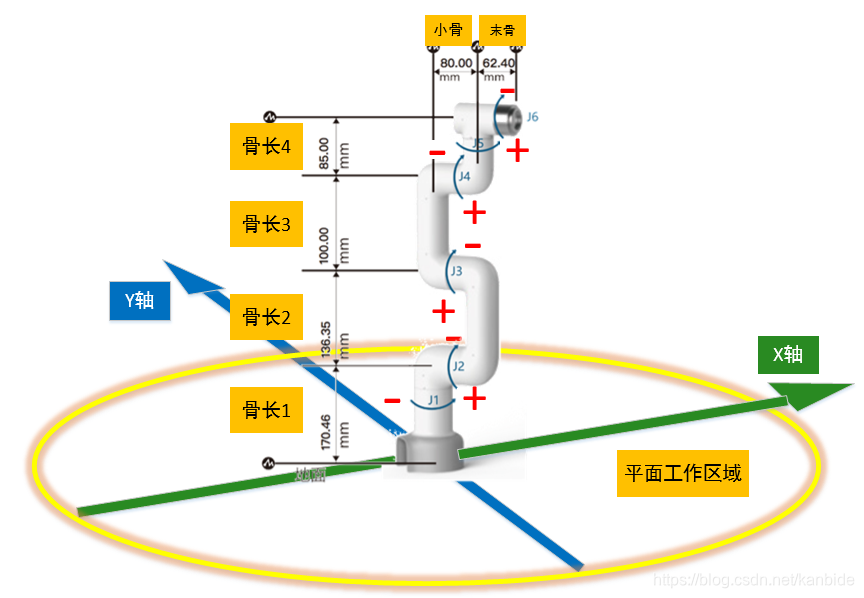
1.1 部件与尺寸
机械臂如下部件组成,描述如下表:
|
序号 |
名称 |
描述 |
在python中的定义 |
|
1 |
骨长1 |
机械臂原点至第1弯头中心,距离170.48mm |
类名:Mini_Arm,属性名:骨长1 |
|
2 |
骨长2 |
第1弯头至第4弯头中心,距离138.35mm |
类名:Mini_Arm,属性名:骨长2 |
|
3 |
骨长3 |
第4弯头至第5弯头中心,距离100mm |
类名:Mini_Arm,属性名:骨长3 |
|
4 |
骨长4 |
第5弯头至第7弯头中心,距离85mm |
类名:Mini_Arm,属性名:骨长4 |
|
5 |
小骨 |
第(1至2)、(3至4)、(5至6)弯头距离的统称,距离80mm |
类名:Mini_Arm,属性名:小骨 |
|
6 |
末骨 |
J5转轴中心至机械臂末端的距离,62.40mm |
类名:Mini_Arm,属性名:末骨 |
|
7 |
J1 |
第1个旋转电机角度,范围[-165°,165°] |
类名:Mini_Arm,属性名:J[0] |
|
8 |
J2 |
第2个旋转电机角度,范围[-90°,90°] |
类名:Mini_Arm,属性名:J[1] |
|
9 |
J3 |
第3个旋转电机角度,范围[-120°,120°] |
类名:Mini_Arm,属性名:J[2] |
|
10 |
J4 |
第4个旋转电机角度,范围[-120°,120°] |
类名:Mini_Arm,属性名:J[3] |
|
11 |
J5 |
第5个旋转电机角度,范围[-180°,180°] |
类名:Mini_Arm,属性名:J[4] |
|
12 |
J6 |
第6个旋转电机角度,范围[-180°,180°] |
类名:Mini_Arm,属性名:J[5] |
1.2坐标系与工作空间
机械臂坐标系为数学直角正交坐标系,每个电机绕着旋转轴顺时针、逆时针旋转(正负已经标明),方向如图1所示,机械臂通过6个电机的旋转运动,实现了一系列复杂的动作。
注意,由于机械结构和设计的原因,有的电机不能进行-180°至180°的全向转动,会有一个转动的范围(见上表),这部分没有在python中实现。
2、机械臂运动控制原理
机械臂运动控制要解决的核心问题是,知道物体的位置(中心点坐标)和主方向(物体的朝向),程序自动计算出机械臂的各关节角度位置,将夹具准确送到抓取物体的部位,并对准抓取位置。
2.1机械臂运动的几何简化
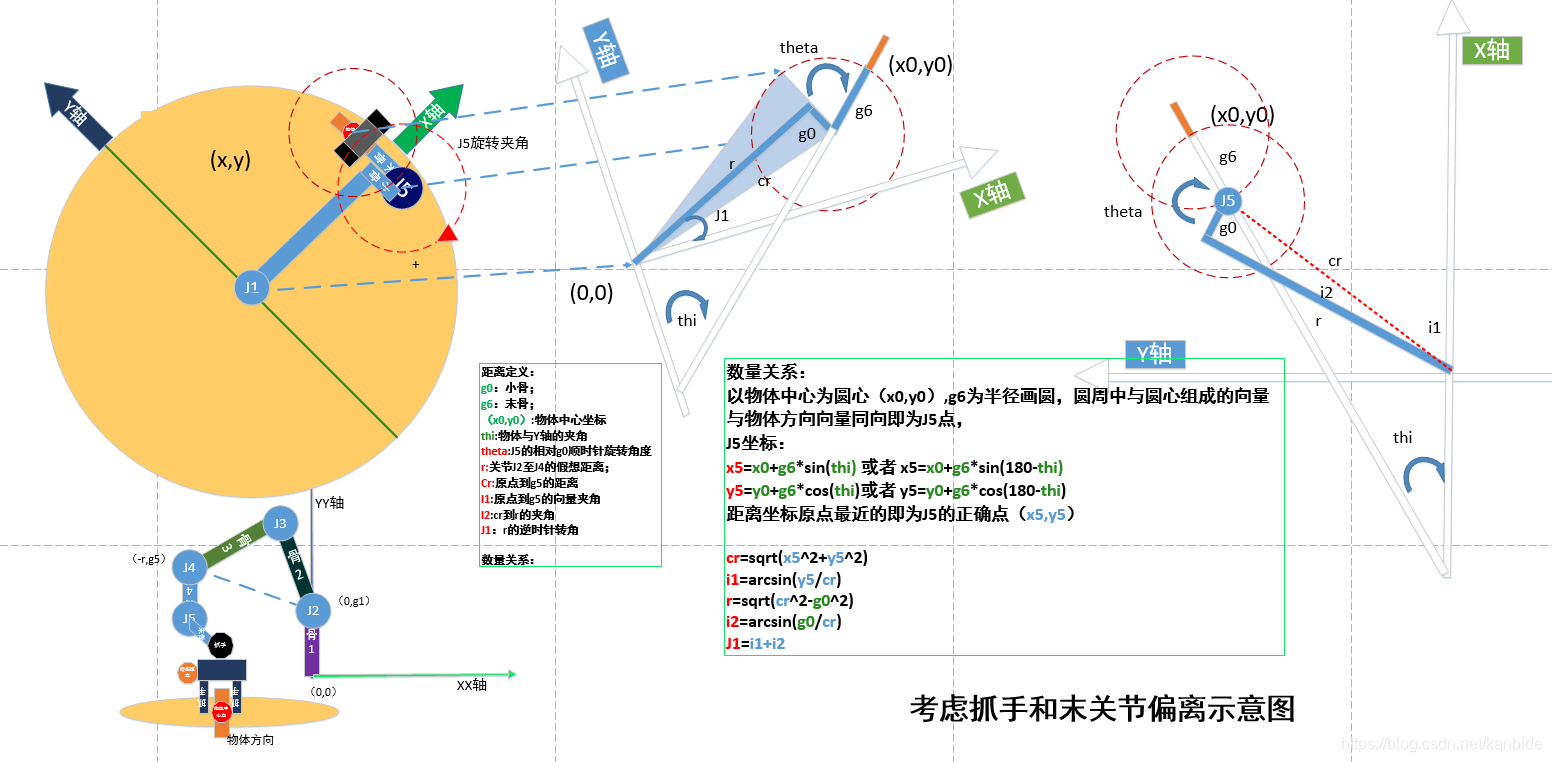
总体思路是将机械臂的三维复杂运动简化为两个平面的运动,即“俯视平面”,和“垂直平面(本文叫R平面)”的组合运动。如下两个图:


2.2机械臂抓手即后面末关节的处理
普通的机械臂的控制以上就可以,由于我手头这个大象机械臂比较特殊,有很多90度弯头,而且抓手安装后,他的落点与上面简化模型就出现了偏差,因此,还需要根据这个特点,根据实际的物体坐标和主方向,计算出上节的理想抓手坐标点(x,y),然后就能求出全部关节的角度了。
3、python源码
以下是源代码,可以直接运行,
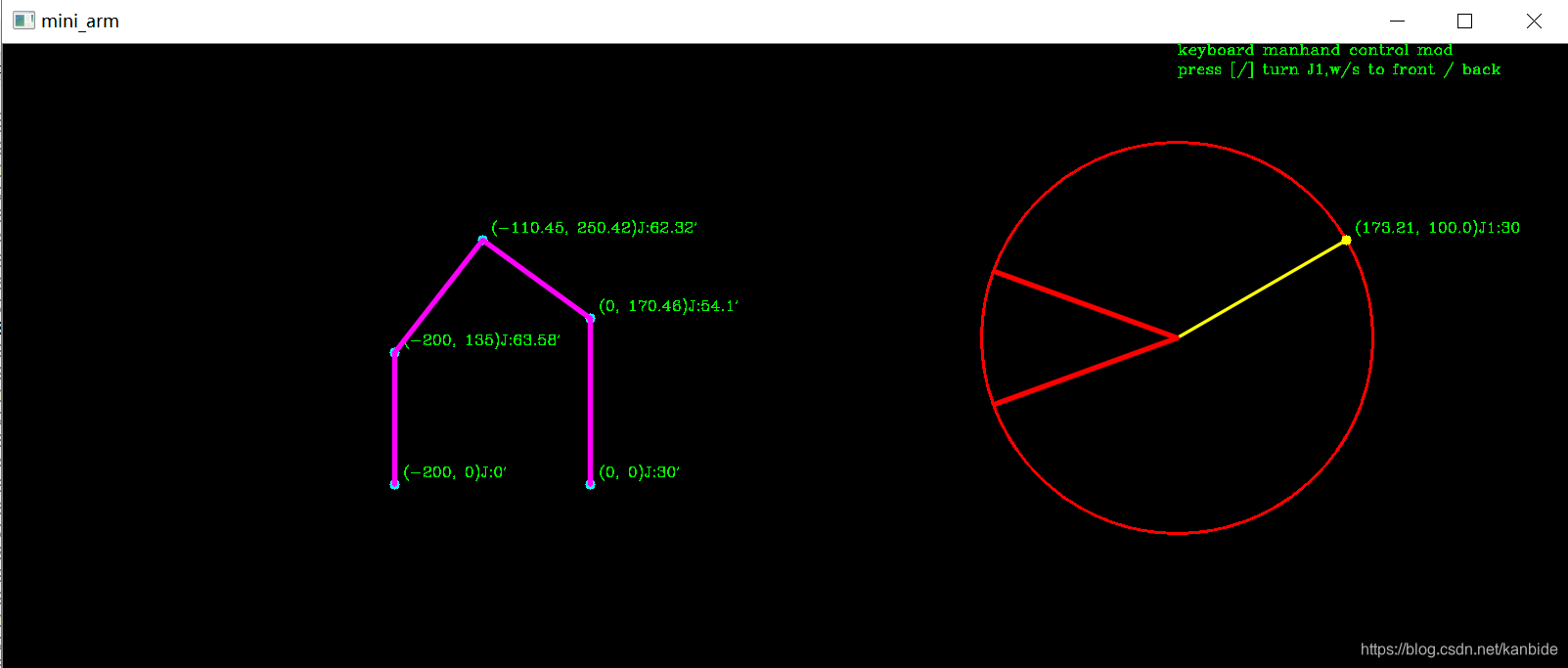
按键盘"O"键,进入自动鼠标点击右侧图机械臂工作半径范围的地方,自动计算各关节的旋转坐标。
再按键盘"O"键,退出鼠标点击计算模式,改用监盘手动操作模式,按“[”或 “]”,是J1关节旋转,按“w"是扩大作业半径,按"s"是缩小作业半径。
运行效果如下:
# -*- coding: utf-8 -*- """ Created on Sat Jul 31 11:29:37 2021 @author: JAMES费 """ import matplotlib.animation as animation import matplotlib.pyplot as plt import sys import logging import time import numpy as np import math import cmath import cv2 logging.basicConfig(level=logging.DEBUG) class Mini_Arm: """ 定义机械臂的长度,单位mm 工作空间 坐标计算 """ exval={ "com":"COM21", "baud":115200, "port":6666, "host":"localhost" } #以下定义机械臂的物理参数,对照手册配图 骨长1=170.46 骨长2=136.35 骨长3=100 骨长4=75 小骨长=80 末骨长=62.4 抓手长=60 J=[0,0,0,0,0,0] #表示关节角度,J1,J2,J3,J4,J5,J6 抓手坐标=(0,0) 工作半径范围=(50,骨长2+骨长3-5) R=0 mycobot=None 当前坐标=[0,0,0,0,0,0] 当前角度=[0,0,0,0,0] winevent={ "doubleclick":0, "keymod":0 } winH=900 winW=1600 pz2=(int(winW*3/4),int(winH/3)) p0=(None,None) thi=0 pJ5=(None,None) def __init__(self, **kwargs): """ 初始化类: 串口:com="COM21" 波特率:baud=115200 web端口:port=6666 主机地址:host="localhost" """ self.mathods=dir(self) for k,v in kwargs.items(): if k in self.exval.keys(): self.exval[k]=v #self.mycobot = MyCobot(self.exval["com"]) cv2.namedWindow('mini_arm') cv2.setMouseCallback('mini_arm',self.mousecallback) #print(self.exval["com"]) #监听点击像素坐标 def mousecallback(self,event,x,y,flags,param): if event==cv2.EVENT_LBUTTONDBLCLK: if self.winevent["keymod"]==1: self.根据窗口点击计算目标点(x,y) print("点击坐标点",(x,y)) def 根据窗口点击计算目标点(self,x,y): #转化为机械臂坐标 (px,py)=self.pz2 #r=np.sqrt((x-px)**2+(py-y)**2) (x0,y0)=(x-px,py-y) self.thi=30 res,J1,J5,R=self.计算J1_5_R(x0,y0,self.thi) if res!=True: print("out of workspace") self.p0=(None,None) else: self.p0=(x0,y0) self.J[0],self.J[4],self.R=J1,J5,R print("计算结果J1,J5,R:",[self.J[0],self.J[4],self.R]) print("目标点坐标",self.p0) #计算其它坐标 return 1 def 计算J1和R(self): """ #已知抓手坐标,求J1单位/°,R距离/mm """ try: (x,y)=self.抓手坐标 J1=np.arctan(y/x)/np.pi*180 self.R=x/np.cos(J1) self.J[0]=J1 return 1 except Exception as e: logging.error("计算J1异常:",e) def 计算抓手坐标(self,J1,R): """ #已知J1单位/°,R距离/mm,求抓手坐标 """ try: (x,y)=(0,0) x=R*np.cos(J1/180*np.pi) y=R*np.sin(J1/180*np.pi) return (round(x, 2),round(y, 2)) except Exception as e: logging.error("计算J1异常:",e) def 计算J1(self,x,y): """ #已知抓手坐标,求J1单位/°,R距离/mm """ try: R=np.sqrt(x**2+y**2) J1=math.degrees(cmath.polar(complex(x,y))[1]) return round(R, 2),round(J1, 2) except Exception as e: logging.error("计算J1异常:",e) def 判断象限(self,x,y): """ 根据直角坐标(x,y),判断在第几象限 返回值 1:第一象限 2:第二象限 3:第三象限 4:第四象限 10:在x正半轴 -10:在x负半轴 20:在y正半轴 -20:在y负半轴 0:在坐标原点 """ if x>0 and y>0: return 1 elif x<0 and y>0: return 2 elif x<0 and y<0: return 3 elif x>0 and y<0: return 4 elif x>0 and y==0: return 10 elif x<0 and y==0: return -10 elif x==0 and y>0: return 20 elif x==0 and y<0: return -20 else: return 0 def 计算J5坐标(self,x0,y0,thi): """ 已知物体的坐标,主方向,计算J1、J6、R x0,y0为物体中心点坐标 thi为物体主方向与机械臂x轴的逆时针夹角° """ g6=self.末骨长 g0=self.小骨长 try: x5=x0+g6*np.cos(math.radians(thi)) x5i=x0+g6*np.cos(math.radians(180+thi)) y5=y0+g6*np.sin(math.radians(thi)) y5i=y0+g6*np.sin(math.radians(180+thi)) r=np.sqrt(x5**2+y5**2) ri=np.sqrt(x5i**2+y5i**2) #print("x5,y5,x5i,y5i,r,ri",x5,y5,x5i,y5i,r,ri) if r<=ri and g0<r: return (x5,y5) elif r<=ri and g0<ri and g0>r: return (x5i,y5i) elif r>ri and g0<ri: return (x5i,y5i) elif r>ri and g0<r and g0>ri: return (x5,y5) else: self.p0=(None,None) logging.error("cannot 计算 J5,woring 目标值") return False except Exception as e: logging.error("计算计算J5坐标异常:",e) def 计算三点逆时针角度(self,p1,p0,p2): """ 计算向量P0-->p1至 P0-->p2的逆时针转角 math.degrees(x)弧度转换为角度 math.radians(x)角度转弧度 cn = complex(3,4) cmath.polar(cn) #返回长度和弧度 cn1 = cmath.rect(2, cmath.pi)极坐标转直直角坐标 cn1.real,cn1.imag#返回x,y """ try: (x0,y0)=p0 (x1,y1)=p1 (x2,y2)=p2 #向量P0-->p1的极坐标转角 x=x1-x0 y=y1-y0 alpha1=math.degrees(cmath.polar(complex(x,y))[1]) #向量P0-->p2的极坐标转角 x=x2-x0 y=y2-y0 alpha2=math.degrees(cmath.polar(complex(x,y))[1]) alpha=alpha2-alpha1 return round(alpha, 2) except Exception as e: logging.error("计算计算J5坐标异常:",e) def 计算J1_5_R(self,x0,y0,thi): """ 已知物体的坐标,主方向,计算J1、J5、R x0,y0为物体中心点坐标 thi为物体主方向与机械臂x轴的逆时针夹角° """ g0=self.小骨长 (minr,maxr)=self.工作半径范围 try: pJ5=self.计算J5坐标(x0,y0,thi) if pJ5!=0: (x5,y5)=pJ5 self.pJ5=pJ5 #print("Pj5:",pJ5) cr=np.sqrt(x5**2+y5**2) i1=math.degrees(cmath.polar(complex(x5,y5))[1]) R=np.sqrt(cr**2-g0**2) i2=math.degrees(np.arcsin(g0/cr)) J1=i1+i2 p0=(x0,y0)#目标点中心坐标 pm=self.计算抓手坐标(J1,R)#假想目标点中心坐标 J5=self.计算三点逆时针角度(p0,pJ5,pm) if R<minr or R>maxr: logging.error("超出工作范围") return False,self.J[0],self.J[4],self.R else: return True,round(J1, 2),round(J5, 2),round(R, 2) else: logging.error("计算J1_5_R异常") return False,self.J[0],self.J[4],self.R except Exception as e: logging.error("计算计算J1_5_R异常:",e) def 计算J2_4(self): """ 已知 g1=self.骨长1 g2=self.骨长2 g3=self.骨长3 g4=self.骨长4 g5=g4+self.抓手长 r=self.R 求关节,J2、J3、J4 """ try: g1=self.骨长1 g2=self.骨长2 g3=self.骨长3 g4=self.骨长4 g5=g4+self.抓手长 r=self.R lr=np.sqrt(r**2+(g5-g1)**2) Ji=np.arcsin(r/lr)/np.pi*180; i2=np.arccos((lr**2+g2**2-g3**2)/(2*lr*g2))/np.pi*180 i3=np.arccos((g3**2+g2**2-lr**2)/(2*g3*g2))/np.pi*180 i4=np.arccos((lr**2+g3**2-g2**2)/(2*lr*g3))/np.pi*180 J2=Ji-i2 J3=180-i3 J4=180-i4-Ji self.J[1]=J2 self.J[2]=J3 self.J[3]=J4 #print("计算结果",lr,Ji,i2,i3,i4,J2,J3,J4) return 1 except Exception as e: logging.error("计算J2_4异常:",e) def 计算各关节点坐标(self): """ 已知关节旋转角度,求在R平面的关节坐标 """ g1=self.骨长1 g2=self.骨长2 g3=self.骨长3 g4=self.骨长4 g5=g4+self.抓手长 r=self.R J2=self.J[1] try: x=[0,0,0,0,0] y=[0,0,0,0,0] x[1]=0#关节J2的x坐标 y[1]=g1#关节J2的y坐标 x[2]=g2*np.cos((90+J2)/180*np.pi) y[2]=g1+g2*np.sin((90+J2)/180*np.pi) x[3]=-r y[3]=g5 x[4]=-r y[4]=0 return (x,y) except Exception as e: logging.error("计算各点坐标异常:",e) def ui(self,H,W): #text format org = (40, 80) fontFace = cv2.FONT_HERSHEY_COMPLEX fontScale = 0.5 fontcolor = (0, 255, 0) # BGR thickness = 1 lineType = 4 bottomLeftOrigin = 1 while 1: #背景颜色 高,宽 self.winH=H self.winW=W background = np.zeros((H, W, 3), np.uint8) #生成一个空灰度图像 key = cv2.waitKey(1) if int(key) == ord('q'): cv2.destroyWindow('mini_arm') break if self.winevent["keymod"]==0: if int(key) == ord('['): self.J[0]+=2 if self.J[0]>=160: self.J[0]=160 if int(key) == ord(']'): self.J[0]-=2 if self.J[0]<=-160: self.J[0]=-160 if int(key) == ord('w'): self.R+=2 if self.R>=self.工作半径范围[1]: self.R=self.工作半径范围[1] if int(key) == ord('s'): self.R-=2 if self.R<=self.工作半径范围[0]: self.R=self.工作半径范围[0] if int(key)==ord('z'): self.R=200 self.J[0]=0 else: if int(key) == ord('['): self.thi+=2 if self.thi>=180: self.thi=180 res,J1,J5,R=self.计算J1_5_R(self.p0[0],self.p0[1],self.thi) if res: self.J[0],self.J[4],self.R=J1,J5,R if int(key) == ord(']'): self.thi-=2 if self.thi<=-180: self.thi=-180 res,J1,J5,R=self.计算J1_5_R(self.p0[0],self.p0[1],self.thi) if res: self.J[0],self.J[4],self.R=J1,J5,R if int(key)==ord('o'): if self.winevent["keymod"]==0: self.winevent["keymod"]=1 else: self.winevent["keymod"]=0 #update(a,axes) if self.winevent["keymod"]==1: text = "window selected mod press o to esc" (px,py)=self.pz2 if self.p0 !=(None,None) and self.pJ5!=(None,None): p=self.计算抓手坐标(self.J[0],self.R) px0=px+int(p[0]) py0=py-int(p[1]) cv2.circle(background,(int(self.p0[0]+px),int(py-self.p0[1])),5,(255,255,255),-1) cv2.circle(background,(int(self.pJ5[0]+px),int(py-self.pJ5[1])),5,(255,255,255),-1) cv2.line(background,(px0,py0),(int(self.pJ5[0]+px),int(py-self.pJ5[1])),(255,0,255),4,cv2.LINE_AA) else: text = "keyboard manhand control mod " tips="press [/] turn J1,w/s to front / back" cv2.putText(background, tips, (W-400, 30), fontFace, fontScale, fontcolor, thickness, lineType) cv2.putText(background, text, (W-400, 10), fontFace, fontScale, fontcolor, thickness, lineType) #######绘制左边边的坐标图 pz1=(int(W*1.5/4),int(H/2))#左侧坐标的原点 if self.计算J2_4(): point=self.计算各关节点坐标() x=point[0] y=point[1] ##画关节点 num=0 bones=[] for dx,dy,j in zip(x,y,self.J): tx=pz1[0]+int(dx) ty=pz1[1]-int(dy) bones.append((tx,ty)) cv2.circle(background,(tx,ty),5,(255,255,0),-1) #画标注 text = str((round(dx, 2),round(dy, 2)))+"J:"+str(round(j, 2))+"'" #text = 'angles:little[ddd'+str(888) cv2.putText(background, text, (tx+8, ty-8), fontFace, fontScale, fontcolor, thickness, lineType) ##画骨架 for i in range(4): cv2.line(background,bones[i],bones[i+1],(255,0,255),4,cv2.LINE_AA) #######绘制右边的坐标图 pz2=(int(W*3/4),int(H/3))#旋转坐标的原点 self.pz2=pz2 #计算抓手坐标及转换成图像坐标 p=self.计算抓手坐标(self.J[0],self.R) px=pz2[0]+int(p[0]) py=pz2[1]-int(p[1]) ###画半径 cv2.circle(background,pz2,int(self.R),(0,0,255),2) #画圆 #画抓手坐标点 cv2.circle(background,(px,py),5,(0,255,255),-1) #画圆 #画标注 text = str(p)+"J1:"+str(self.J[0]) #text = 'angles:little[ddd'+str(888) cv2.putText(background, text, (px+8, py-8), fontFace, fontScale, fontcolor, thickness, lineType) cv2.line(background,pz2,(px,py),(0,255,255),2,cv2.LINE_AA) #计算边界线 p=self.计算抓手坐标(160,self.R) px=pz2[0]+int(p[0]) py=pz2[1]-int(p[1]) pyy=pz2[1]+int(p[1]) cv2.line(background,pz2,(px,py),(0,0,255),4,cv2.LINE_AA) cv2.line(background,pz2,(px,pyy),(0,0,255),4,cv2.LINE_AA) cv2.imshow('mini_arm',background) if __name__ == '__main__': a=Mini_Arm() a.R=200 a.J[0]=30 print("正解抓手坐标为:",a.计算抓手坐标(a.J[0],a.R)) x=173.20 y=100 print("正解抓手J1为:",a.计算J1(x,y)) a.ui(900,1600)
