机器人的振动控制问题
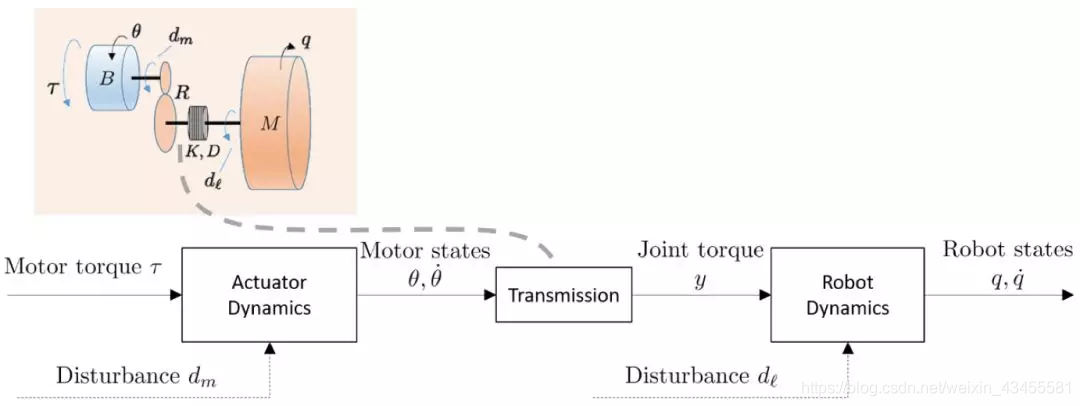

当机器人控制系统的设计将关节柔性忽略时,也许电机的运动位置能够被较为精确的控制,然而在加速度很高的情况下,大传动力会导致机器人的连杆位置与电机位置出现较大偏差,同时在运动结束时机器人连杆将在其平衡位置附近进行较长时间的振动。
方案1:基于反馈的振动控制
如果我们可以较为精确的同时测量机器人电机与连杆的位置甚至速度,那么便有可能通过机器人连杆轨迹与参考运动轨迹的偏差来调整电机的控制力矩,从而实现对机器人连杆位置的精确控制来消除由于弹性变形导致的振动。这种反馈控制问题可以通过例如Integrator Backstepping之类的非线性控制方法来解决。
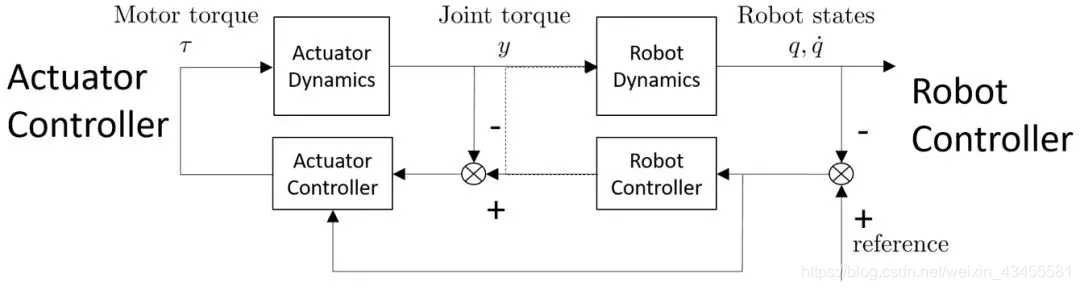
设计思路如下图所示:
- 1)首先将机器人连杆侧看作以关节传动力y为输入,以连杆位置q为输出的系统,并针对其特性设计能够实现精确连杆位置控制的机器人控制器Robot Controller以产生参考关节传动力;
- 2)其次通过李雅普诺夫稳定性理论设计能够同时保证连杆位置误差与传动力控制误差收敛的驱动器控制器Actuator Controller,这一控制器以连杆实际位置误差与关节传动力控制误差为输入,以电机力矩为输出。通过这一设计,即使在关节具有很大柔性的情况下,机器人连杆位置也能够被精确的控制从而消除振动。
即:Integrator Backstepping反馈控制器
在实际使用中,为了消除模型参数误差等因素的影响,需要加入自适应控制等其他控制方法。
大体来说,在机器人同时具有电机侧与连杆侧的传感器,并且在控制器设计中充分考虑动力学特性的前提下,反馈控制能够在很大程度上弥补由于机械结构柔性所造成的振动问题。
方案2:基于前馈的振动控制
在传感器数量不足的情况下,前馈控制成为了振动抑制的一种可行选择。
柔性工具或负载的动态特性可以通过线性系统近似建模,机器人运动控制的目标为驱动柔性负载的末端达到指定位置。由于负载自身存在柔性,当加快机器人的运动速度时,负载末端将出项明显的变形。
在各种对这种线性系统进行振动抑制的前馈方法中,输入整形Input Shaping是最为简单有效的方法。
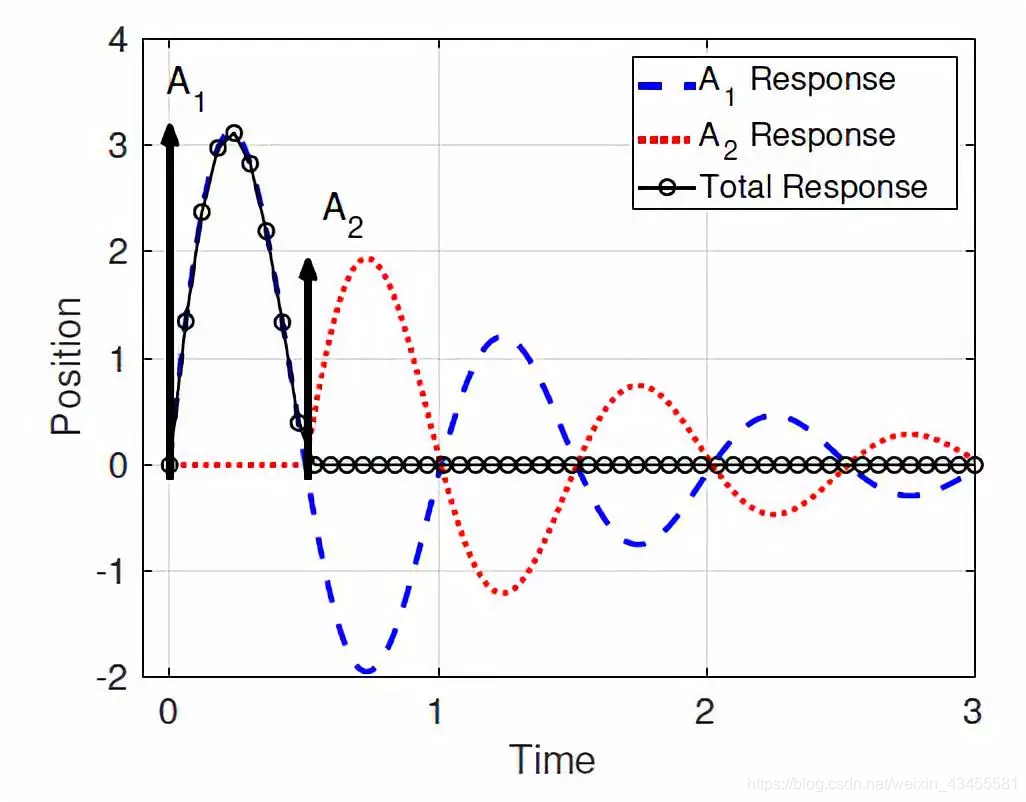
Input Shaping的原理非常简单:如果存在某个会导致系统产生残余振动的输入信号A,那么必然存在一个能够通过将原有输入进行适当延迟与缩放后得到的信号B,使得当信号A与B共同作于的结果是在某个时间点之后系统不存在残余振动。这一原理如图九所示,其中蓝线为信号A对应的系统响应,红线为信号B对应的系统响应,黑线为将A与B叠加后的系统响应。可以看到在图中A与B叠加的信号使得系统在0.5s之后没有残余振动。
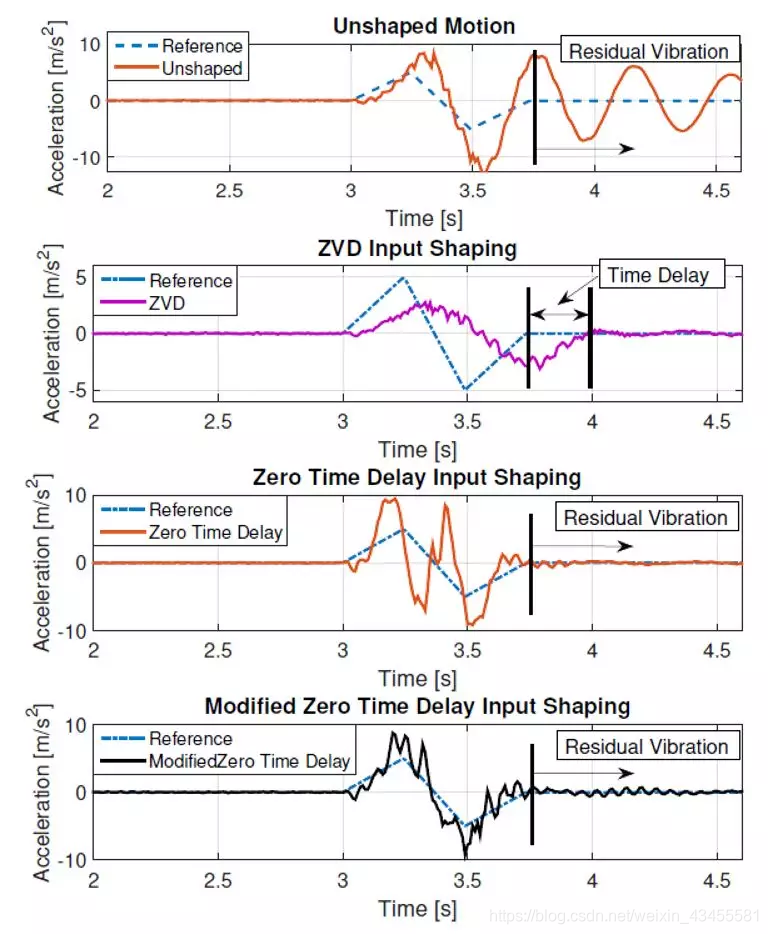
当然Input Shaping并不是没有任何缺陷,其中最大的问题在于Input Shaping这一方法本身会对系统响应引入延迟,这一延迟为系统半固有周期的倍数(例如0.5周期,1个周期,1.5个周期…),同时这一延迟会随着Input Shaping设计鲁棒性的增强而增长。由于这一延迟的存在,Input Shaping消除系统振动的同时也减慢了运动速度。
为了解决Input Shaping的延迟问题,一种自然的思路便是将系统原有输入信号加速以缩短运动时间,然后对加速后的信号执行Shaping。这样即使Input Shaping引入了延迟,被加速之后再被延迟的信号仍然能实现与原有输入信号相同的长度。Zero Time Delay Input Shaping便是基于这种思路设计的方法。
在实际测试中,Zero Time Delay Input Shaping 被证实能够在有效减小系统残余振动的前提下不引入延迟。然而,当期望的运动时间和系统的固有周期接近时,系统原有的输入信号需要被大幅加速,这一操作将导致经过加速再Shaping后的信号非常不光滑,从而造成更加严重的高频振动。Modified Zero Time Delay Input Shaping正是为了解决这一问题而提出的设计。Modified Zero Time Delay Input Shaping的设计认为,如果能够减小Input Shaping所需要的延迟时间,那么对原有输入信号的加速操作的负担将大为减轻,从而减小产生不光滑输入信号的可能性。
下图为Modified Zero Time Delay Input Shaping.
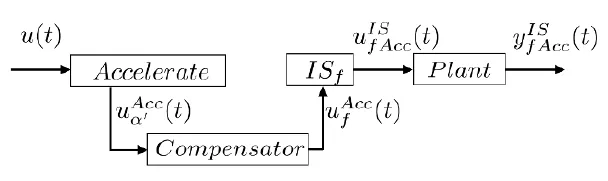
Modified Zero Time Delay Input Shaping的设计应用了Laplace变换的基本性质,即:如果将信号f与信号g同时进行时域的缩放(例如同时加速),那么缩放后的f’与g’的卷积f’*g’将与f*g成比例。利用这一性质,可以对系统设计特定的Compensator,使得系统对任意输入的响应均相当于对原始响应进行加速后的结果。这样相当于缩短了系统的固有周期,从而使得Input Shaping所需的延迟时间变得更短 。实验结果显示Modified Zero Time Delay Input Shaping与Zero Time Delay Input Shaping相比都可以在不引入延迟的情况下有效抑制残余振动,但是Modified Zero Time Delay Input Shaping能够避免输入信号的不光滑,如下图所示。