控制系统的传递函数
【自控笔记】2.4 控制系统的复域数学模型
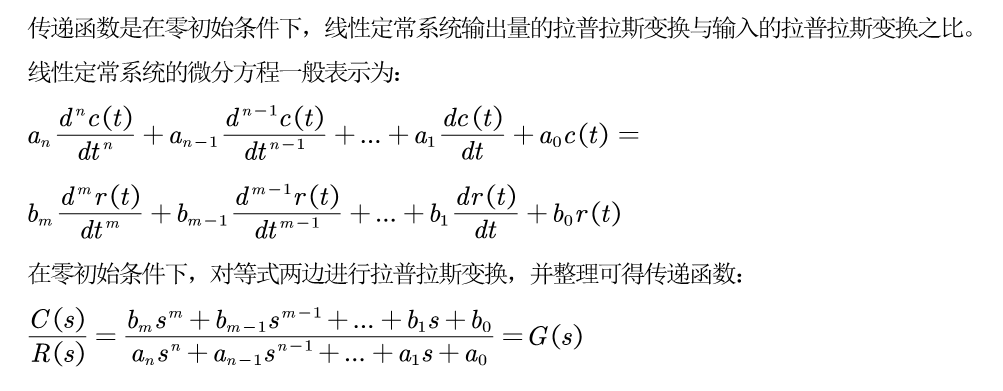
一、传递函数的定义
二、传递函数的性质
拉普拉斯变换是一种线性变换,所以传递函数只适用于描述线性定常系统,并且只适用于零初始条件情况下,对于非零初始条件可将初始条件看作输入使用。传递函数的几个性质如下:
1、传递函数是复变量s的有理分式,它具有复变函数的所有性质。
2、传递函数只取决于系统的结构和参数,与外作用无关,也不反应系统的内部信息。
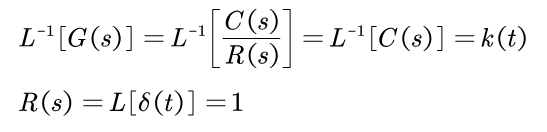
3、传递函数的拉普拉斯反变换即为系统的单位脉冲响应。因为单位脉冲函数的拉普拉斯变换是1,如下图:
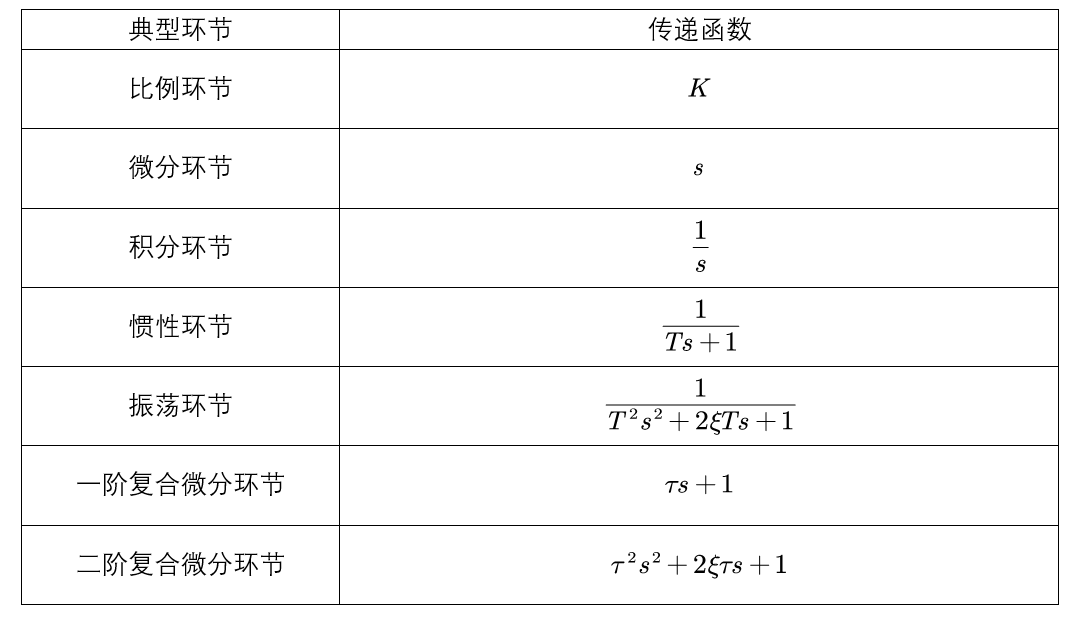
三、传递函数的典型环节
传递函数可以写成零极点形式或者典型环节形式。常见典型环节如下所示:
四、传递函数的零极点对输出的影响
1、极点位置决定了系统的稳定性。
若极点全部位于s平面的左半平面,则系统的模态会随着时间的增加而衰减,最终消失。只要有一个极点的实部大于或等于零,则模态会随着时间增长而发散,系统就无法稳定。
2、极点位置决定了系统的快速性。
在左半平面内,当极点距离虚轴越远(即指数函数图像越陡),其模态衰减得越快;反之则衰减越慢。
3、零点决定了模态的运动比例
当零点离极点较远时,相应极点模态所占的比例较大,离极点较近时,该极点模态所占的比例较小。当零极点重合时,该极点模态所占的比例为0,即出现了零极点对消现象。

