用Simulink 6DOF模型实现四旋翼无人机悬停控制仿真
本文将详细展示如何在Matlab中建立四旋翼飞行模型,能正确对飞行器在力和力矩作下的线运动、角运动进行6DOF仿真,并实现对指定 3D 空间点的悬停控制。
(注:本文将只展示悬停控制数字建模过程,轨迹跟踪控制和编队飞行控制将不具体展示,只展示其仿真结果。)
原文件下载地址:悬停控制simulink仿真源文件
一、姿态内回路搭建
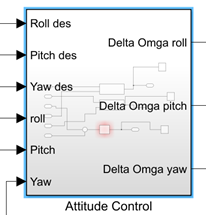
先在simulink中进行控制内回路,即姿态控制回路的搭建。内回路由Attitude Control模块实现,输入为期望姿态角,输出为期望转速,模型如下:
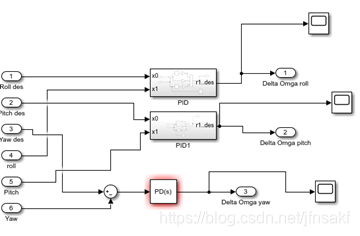
其中“期望姿态角-期望转速”之间的关系通过“比例–微分”控制律建立,如下图所示:
二、电机模型
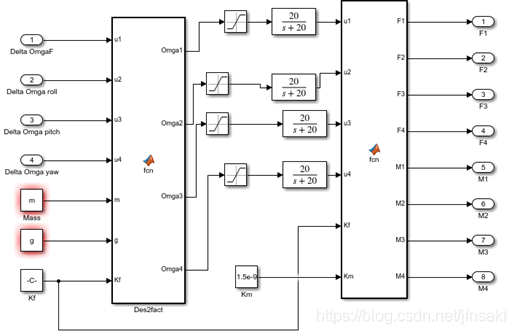
电机模型由Motor Dynamics 模块实现,输入为期望角速度,输出为四旋翼四个电机的输出力和力矩。模型如下图所示:

首先,四个欧拉角转速要转化成四个电机的转速。然后,四个电机的实际转速转化为四个电机的输出力和力矩。以上功能都有Function模块编程实现。另外,由于电机实际特性影响,期望转速与实际转速之间存在延迟,延迟时间可取0.05s。期望转速还应限制在一定转速范围内,范围可取【1000rpm,8000rpm】。
综上所述,模块内部关系如下图所示;
三、动力学和运动学模型建立
无人机动力学和运动学由Rigid Body Dynamics模块实现。
模型如下图所示:

其输入为四个电机输出的力和力矩,输出为无人机的位置、欧拉角、速度等参数。
无人机运动学模型使用的是simulink自带模块6DOF实现。如下图所示:
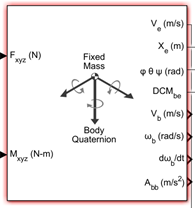
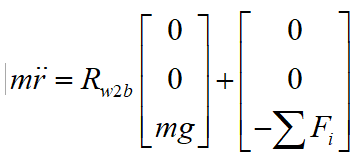
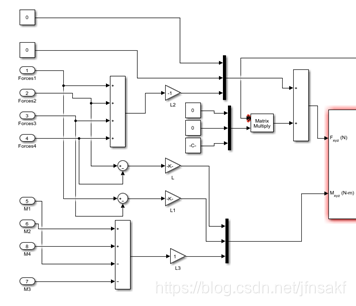
无人机输入的合力由以下公式获得:
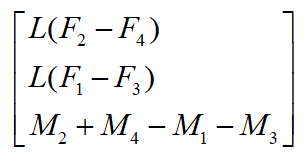
合力矩由以下公式获得:
搭建模型如下图所示:
四、位置外回路搭建
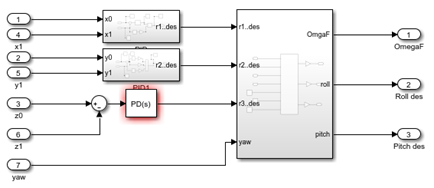
位置外回路由Position Control模块实现。
模型如下图所示:

其输入为XYZ三个坐标的位置误差,输出为期望的滚转、俯仰、和偏航角。首先位置误差通过PID控制器转换为期望的位置加速度,再由期望加速度计算出期望的姿态角。
模型如下图所示:
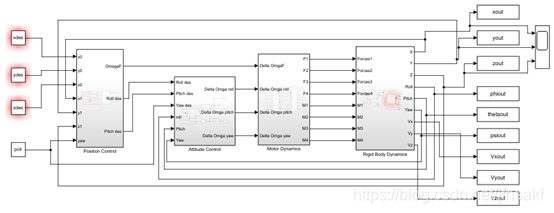
至此,无人机数字模型搭建完毕。
总体模型如下图所示:
五、仿真结果:
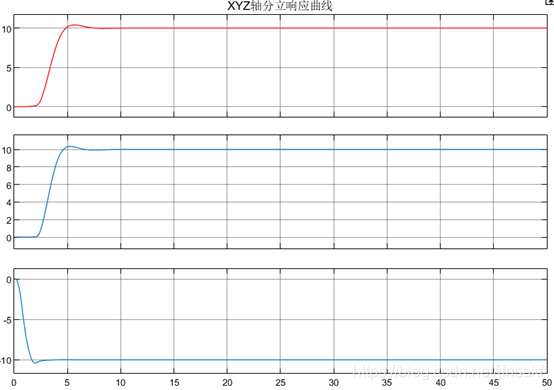
5.1 悬停控制仿真结果
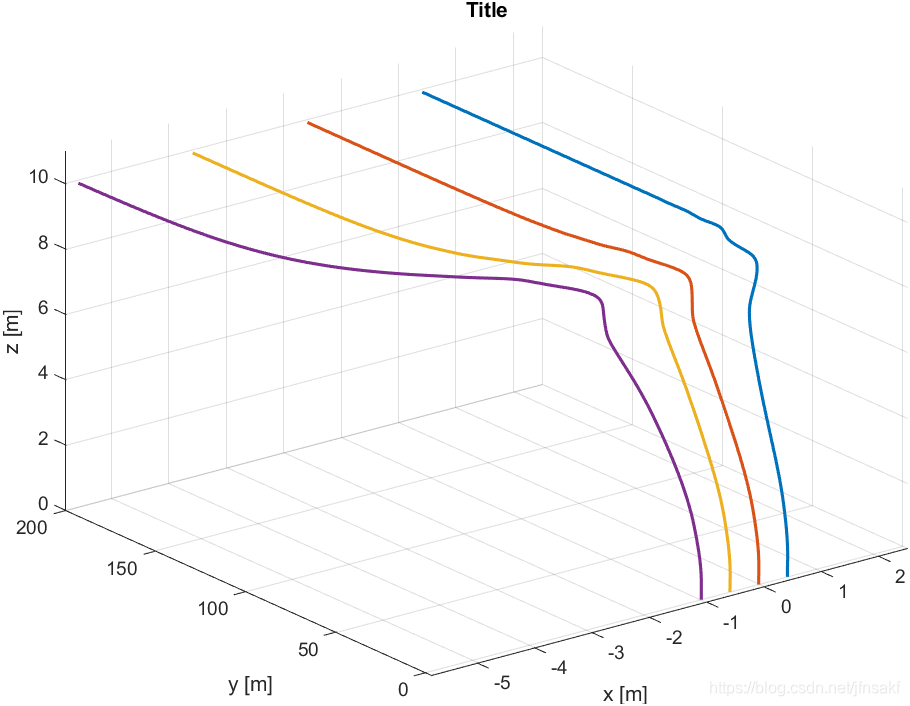
将XYZ期望位置分别设置为10、10、10。得到响应曲线如下图所示:
(注:因模型建立在北东地参考坐标系,因此z轴正方向为负,若想修正加个“-”即可)
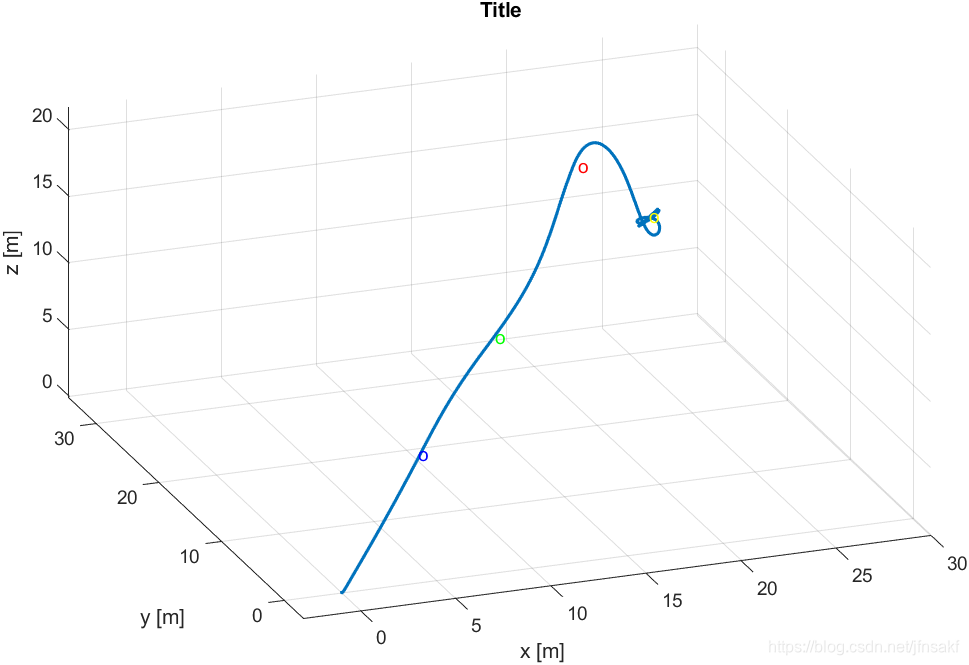
5.2 轨迹跟踪仿真结果
5.3 编队飞行仿真结果