三自由度求解正逆运动学
(空间机器人运动学刚结课,最后的大作业是根据一个3r机械臂求解正、逆运动学;雅可比矩阵;利用拉格朗日方程建立动力学方程;设置控制器;matlab仿真运动。搞了好久,在这就简单地记录一下吧,以及一些知识理解,谢谢)
1.定义
正运动学简单来说就是根据一组关节角求出末端空间位置;而逆运动学则是根据机械臂末端空间位置求出各关节角。
2.举例
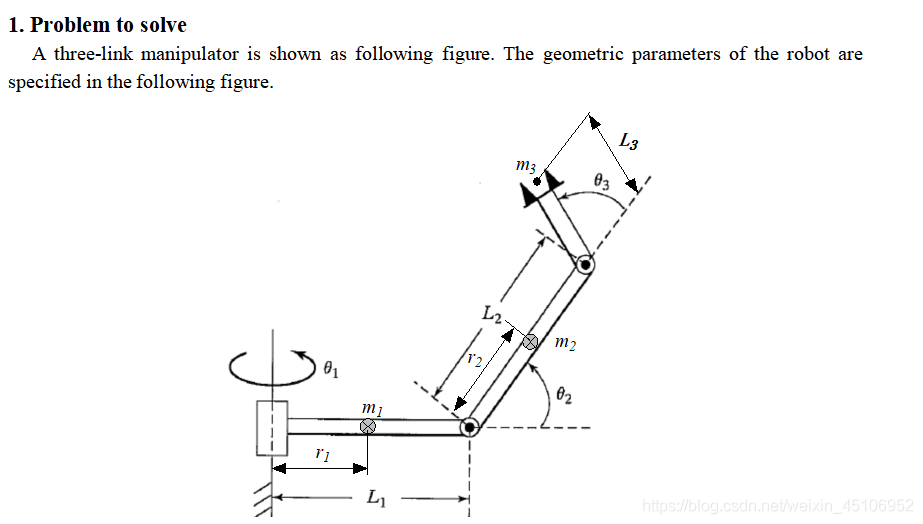
2.1正运动学
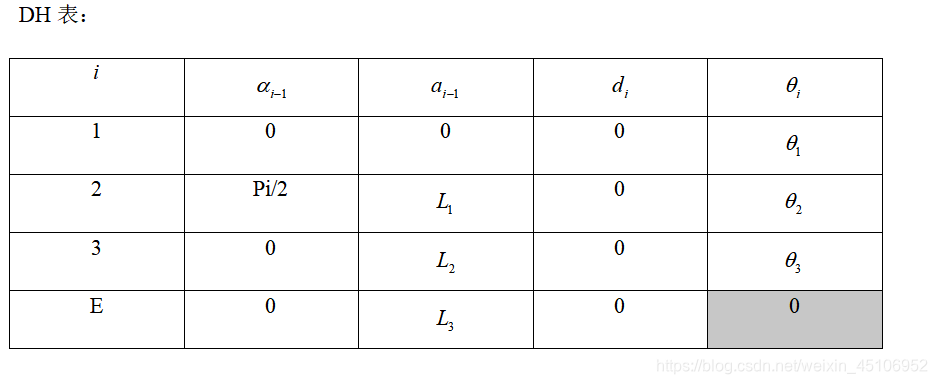
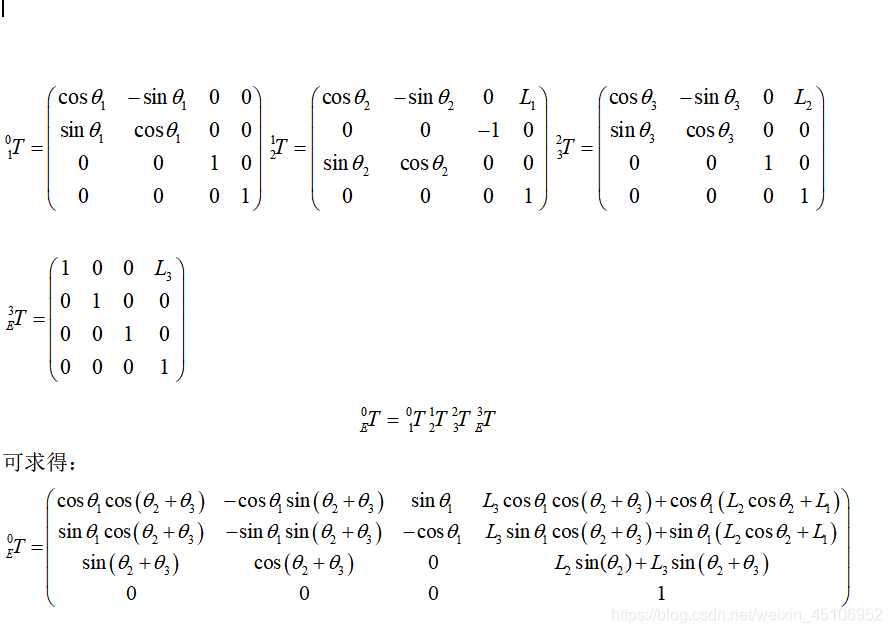
正运动学可以建立各关节的齐次变换矩阵,最后累乘即可,根据D-H参数表建立矩阵(D-H参数表这里就不详细阐述了,有时间单独发一个文章再介绍)。
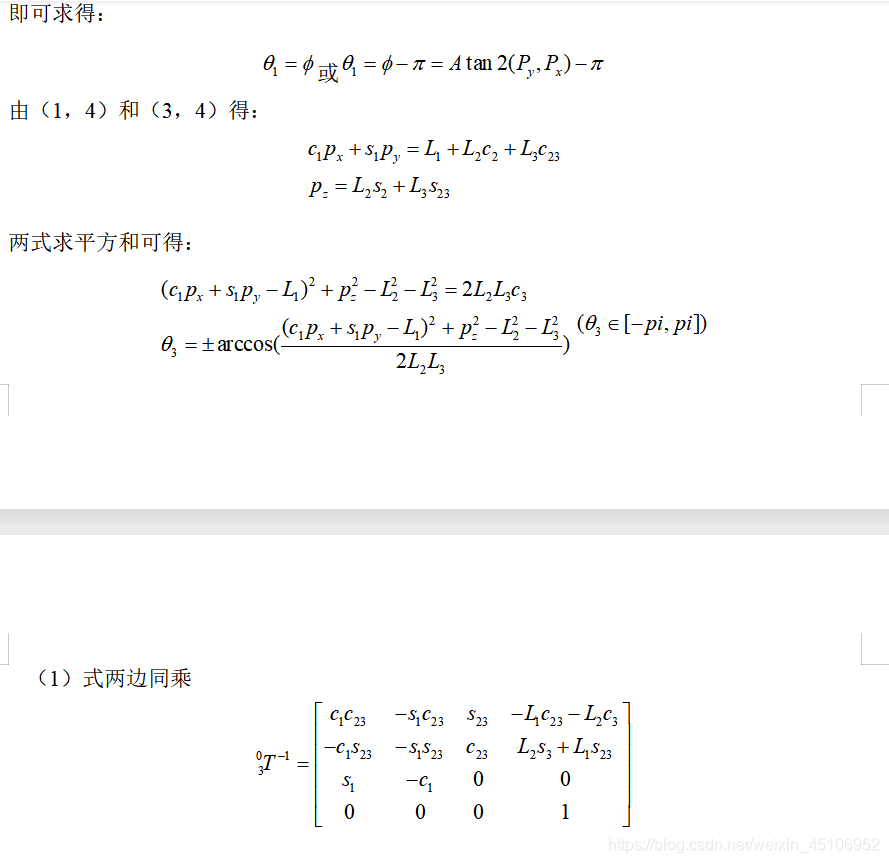
2.2逆运动学
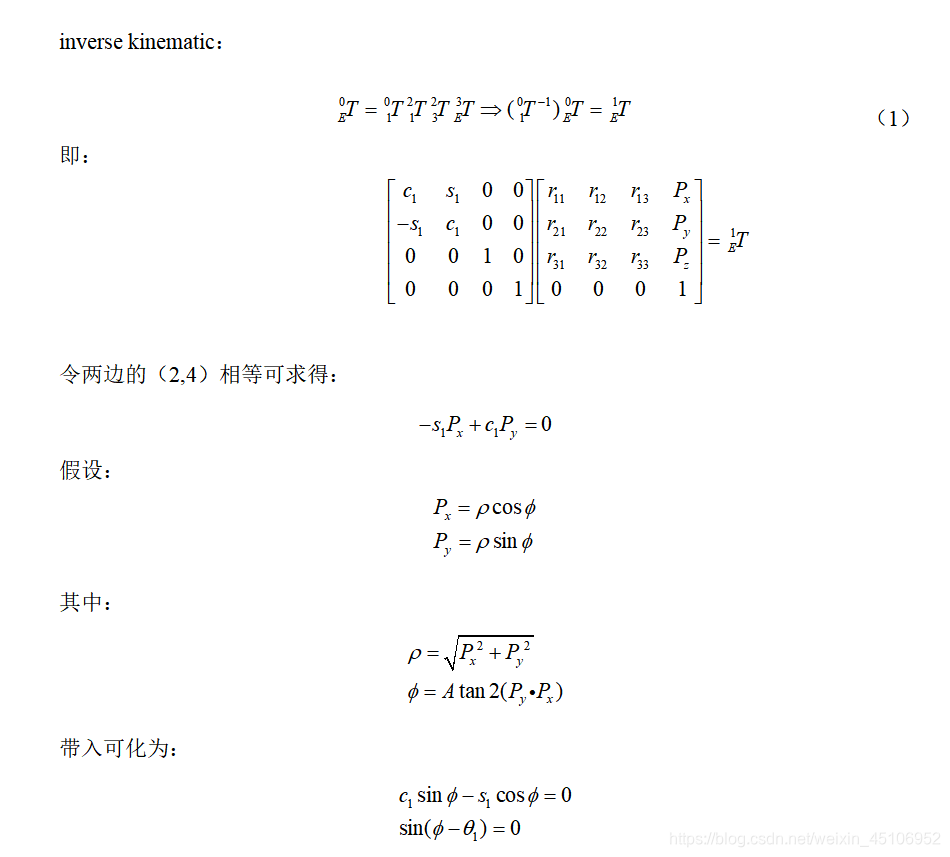
逆运动学相对正运动学是比较复杂的,运算量也是比较大,下面就截图展示了,有什么不明白的可以发在评论区,好,废话不多说,呈下:

3.总结
无论是几自由度,求解正、逆运动学的方法大同小异,仔细看书本知识点,认真研究例题。最后,欢迎指正,谢谢

