可二次开发教育实验跟随车平台
可二次开发教育实验跟随车平台
这种研发主要方向包括UWB/蓝牙的空间感知、实时定位系统、运动控制算法、SLAM路径决策、多传感器融合。专注于跟随机器人及行业应用方案的研发、生产、销售,实现微型小车单车或多车跟随人的低速自动驾驶。致力于以跟随机器人(智能小车、无人机)为载体的人工智能产业。
系统简介
跟随差速底盘车由跟随主机、跟随从机(手持端)、可二次开发整车控制器、电机驱动器、双伺服电机、底板组成。
跟随从机和跟随主机形成RTLS(实时定位系统),跟随主机通过一系列算法,获得跟随从机相对跟随主机的距离和角度,整车控制器提供数据采集(跟随系统位置数据接口、电机运动数据接口),提供电机运动控制接口,提供demo运动控制控制电机驱动器。
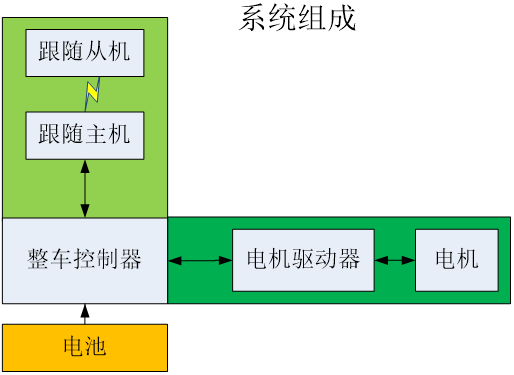
备注:电池由客户自行购买:24V,放电电流10A以上。
伺服轮毂电机和配套伺服驱动器,
采用先进的FOC控制算法与模糊PID控制,不同负载下不抖动,适用于机器人ROS系统的通信协议,可广泛应用于机器人、工业控制等领域。
2个6.5寸伺服轮毂电机

跟随主机和跟随从机
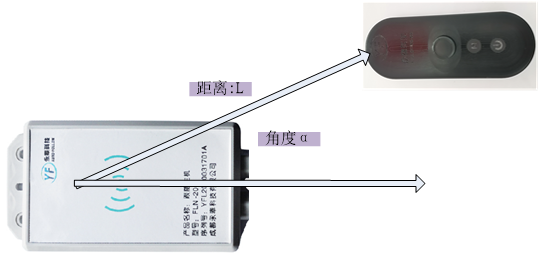
- 定位精度距离精度:20cm,角度:±5°(前方±60°范围内)
- 定位数据刷新率:70hz
- 跟随主机支持多种通讯方式:TTL/RS232/RS485。宽电压范围(6-28V)
整车控制板
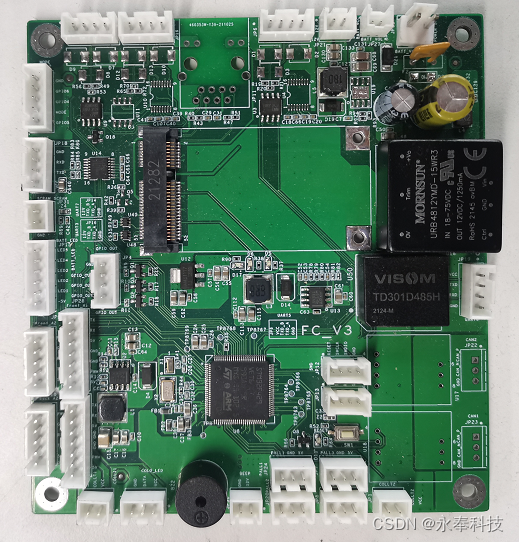
整车控制器支持二次开发。提供运动控制demo软件。接受定制开发。
整车控制器提供数据采集(跟随系统位置数据接口、激光和超声波防撞数据、电机运动数据接口),提供电机运动控制接口,提供demo运动控制控制电机驱动器
- 工作电源:DC 9V~36V
- 通讯接口:TTL/RS232/CAN

